Cool Jobs: Moved by life
Biologically inspired robots travel — naturally
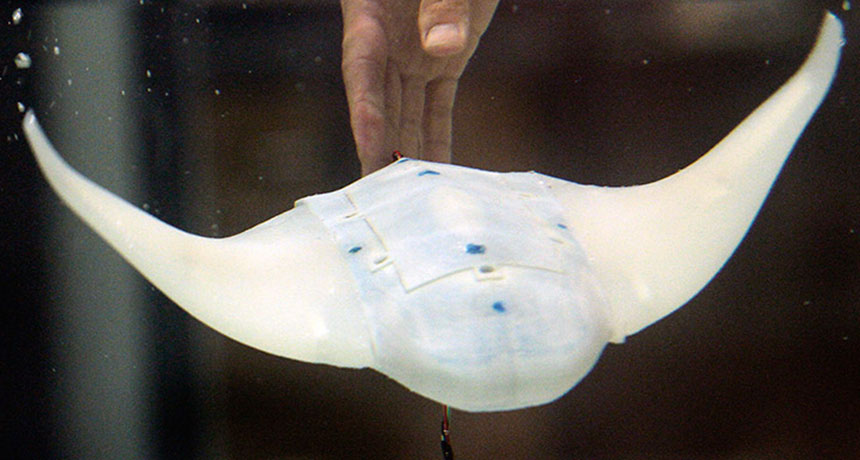
A robot built to mimic the movements of a cownose ray takes a dip.
Norm Shafer
When Dan Goldman was 12, lizards were pretty much the center of his universe. He was fascinated by how they looked, how they behaved — and especially how they moved.
Now a physicist at the Georgia Institute of Technology in Atlanta, Goldman still loves lizards, which explains his latest work. He is studying the locomotion, or movement, of the sandfish. Despite its name, this animal is a lizard. It lives in the deserts of North Africa.
Goldman is particularly interested in the way sandfish avoid predators: They dive under the sand and “swim” away.
“They can dive in half a second,” says Goldman. “If you blink, you’ll miss it.”
Even if you do glimpse a sandfish dive, you won’t see this critter swim. Exactly how it moves beneath the sand had remained a deep mystery — until Goldman and his students took an X-ray peek.
Their X-ray movies revealed the sandfish wiggling smoothly. That inspired them to build a sandfish robot. It, in turn, has helped the researchers test theories about why the lizard’s movements are so efficient.
Goldman is one of three researchers we’ll meet here who study animals for their moves. Each of their subjects has perfected a style of locomotion over millions of years.
But these three engineers don’t just analyze how animals move. They also are using what they learn to build robots. This design of new technologies based on nature is known as biomimicry.
The goal of mimicking some biological adaptation may be simply to better understand how a living thing has mastered its world. Other times, researchers want to use what they learn from animals to make robots that can do important and useful jobs — ones that people can’t do.
In this video, Dan Goldman, a physicist at The Georgia Institute of Technology, discusses his research on the sandfish and how it is inspiring new robots.
Linked skink
The species of sandfish that Goldman studies is 10 to 15 centimeters (four to six inches) long and has yellow and black-brown stripes. These lizards belong to the skink family and live in the Sahara Desert.
As it walks across the sand, a sandfish moves as all lizards do, with a diagonal gait. First, its right front and left rear legs together take a step. Then its left front and right rear legs take a step.
But sandfish move quite differently when they swim beneath the surface, Goldman’s group found. To study that motion, they placed sandfish in a tank of sand. Then they filmed the lizards with X-rays, which can “see” through sand. The ghostlike images showed the lizards wave their bodies from side to side, like a snake, as they swim through sand.

“They hold their limbs parallel to their body and wriggle,” explains Goldman.
Pushing through sand is not an easy task. Sand can behave like a fluid or a solid — or sometimes both at the same time, Goldman notes. It can lock up around you or flow when you don’t want it to move. But snaking through sand proves a quite effective way to travel in this environment.
Once Goldman and his team figured out how the lizards swam, they used that know-how to propel a robot through sand.
They created it by linking six motors in a row. By controlling each motor individually, the team could make their robot wriggle.
To keep the sand from harming the motors, the researchers covered those linked motors in spandex. The stretchy fabric allowed the robot to wriggle freely. Finally, the team attached a carved wooden block to one end. Its triangular — or wedge — shape mimics a lizard’s head.
With a computer to control the individual motors, Goldman’s group directed their robot to bend again and again. Those movements revealed how a robot’s changing shape affected its ability to travel through sand.
The robot swam most easily when it mimicked the wriggling lizard. The animal’s rippling body creates a distinctive wave pattern. That undulating pattern resembles what is called a sine wave. An example is pictured below.
Goldman and his students built their first sandfish robot in 2010. The team has been tinkering with it ever since.
Recently, for example, the researchers attached somewhat differently shaped heads. The robot was able to burrow deeper as it moved forward when its head resembled that of the sandfish. The team thinks this shape explains how sandfish slip under the sand so easily.
“Animals are composed of lots of different parts — muscles, nerves, skeletons,” says Goldman. “The question is: Can you understand what they do when combined? Because they can do some pretty amazing things,” he marvels. “I can’t swim through sand.”
Goldman began his research simply to understand sandfish locomotion. But it turns out his robot might have some practical applications. Such a robot could be used after landslides to search for survivors. Since digging in sandy soil creates risks for rescue workers, a wriggling robot might provide welcome help.
Watch as Hilary Bart-Smith discusses how the cownose ray inspired a swimming robot.
Ray-bot
A very different animal inspired the robot now being developed by a team of researchers that includes University of Virginia mechanical engineer Hilary Bart-Smith. One day it too might do important work not easily performed by people.
Bart-Smith’s robot is modeled after the cownose ray. A member of the shark family, this kite-shaped fish is about 90 centimeters (35 inches) wide. Like the much larger and better known manta ray, the cownose ray has a flattened body and wide fins that resemble wings. It gets its name from its cowlike snout.

The cownose ray is a superb swimmer. It can switch directions quickly and swim long distances. It can glide as easily near the water’s surface as it can along the seafloor.
A robot based on the cownose ray’s shape and locomotion would be ideal for many tasks, such as exploring the ocean or searching for oil spills.
Bart-Smith and her colleagues spent a lot of time watching their rays before attempting to mimic the fish with a robot. And they learned a lot.
As the ray’s wings flap up, they create a whirlpool of water, which then spins clockwise as it trails behind. When those wings flap down, they form a second whirlpool that spins counter-clockwise.
Scientists call these whirlpools vortices. (If there is just one, it is called a vortex.) When you flush the toilet, water forms a vortex as it rushes down the drain.
When the two vortices meet behind the ray’s wings, they interact to create thrust, a force pushing something forward.
It’s a complicated but not unfamiliar way to move through water. “You do the same thing when you swim with flippers,” explains Bart-Smith.
To give the robot both strength and flexibility, the researchers made its wings from soft, elastic material that will house the devices that take the role of cartilage, muscles and joints.

Inside the wings, an aluminum frame plays the role of the ray’s cartilage. (Like sharks, rays lack bones. Their bodies instead get their structure from firm cartilage.) The robot’s frame is attached to a wire, which in turn acts as the muscle. By pulling and releasing the wire, the frame moves up and down. This flaps the robot’s wings.
Those wings jut out from the robot’s central body section, which is made of hard plastic. Inside, a motor controls the wires that flap those wings. The central section also contains a lithium battery for power and a very simple control system that serves as its “brain.”
Bart-Smith and her team built their first prototype robot in 2012. They now are testing it to see how far it can swim on a single charge of its battery.
“We are getting our robot to swim laps in a pool,” Bart-Smith says. “We think it can probably swim seven kilometers,” or just over four miles.
As an engineer who works with mechanical devices, Bart-Smith was excited to work alongside biologists on her project. They helped her better understand and appreciate animal locomotion, she says.
“When you see these rays swimming, they are absolutely phenomenal. They have a grace about them,” Bart-Smith says. “As an engineered system, it’s amazing. We need to learn from that.”
All in stride
Metin Sitti is another mechanical engineer who has found inspiration in the natural world. While hiking as a child in his native Turkey, Sitti often would spot insects called water striders.
“I was amazed by their skill — by how fast they can move on the water so elegantly,” he recalls.

It wasn’t until years later, after Sitti had begun teaching at Carnegie Mellon University in Pittsburgh, that he realized he could make a mini robot that moved the same way.
Water striders range from one to 10 centimeters (half an inch to four inches) long. Found throughout the world, they glide across the surface of marshes, ponds and rivers.
These insects don’t sink because they are quite light. In fact, they weigh so little that they don’t even break what physicists refer to as the surface tension of the water. All water molecules cling to each other. On the water’s surface, they cling a bit tighter. That clinginess is surface tension.
This tension allows the surface of water to resist an external force — including the downward push of a water strider’s legs. Instead of sinking, the bug glides across the surface.
It helps that the water strider’s six skinny legs are covered by tiny, wax-coated hairs. That wax repels — or pushes away — water. This also helps the insect stay atop the water.

The bug moves forward by pushing down on the two middle legs on each side of its body. That push is never hard enough to break the water’s surface tension. Instead, each downward push creates a dip in the water’s surface. When that dip springs back into place, it slides the strider forward.
This system of locomotion is so efficient that a water strider can move 40 times its body length in a second. (That is like an 8-year-old, who is 1.25 meters (4 feet 1 inch) tall, swimming the 50-meter length of an Olympic pool in just one second.)

After spending long hours watching water striders, Sitti decided to make his robot out of thin stainless steel wires. They are covered in Teflon, the same nonstick coating used on some frying pans. Teflon repels water, just like wax does.
A tiny, lightweight lithium battery powers the robot. A remote controller can guide the robot forward, left and right across the water.
Like Bart-Smith, Sitti thinks his robot could be used to detect and maybe even clean up water pollutants, especially ones that float.
For Sitti, the water strider robot launched his quest to build more robots inspired by nature. He has built a robot that mimics the way geckos walk up walls. Sitti is also working on a robotic flying squirrel that can jump and glide from tree to tree. And he’s even looking at the way single-celled organisms, including bacteria, swim as an inspiration for micro-robots.
Animals large and small have adapted to move differently under various conditions. Sitti, like Goldman and Bart-Smith, believes those movements aren’t just fascinating — they are worth copying and improving upon. After all, for every way we can’t move, there may be a creature (and eventually, a robot) that can.
“I tell my students to observe nature carefully because you never know where you’ll get inspiration,” says Sitti.

Learn about more Cool Jobs.
Power Words
cartilage A type of strong connective tissue often found in joints, the nose and ear. In certain primitive fishes, such as sharks and rays, cartilage provides an internal structure — or skeleton — for their bodies.
engineering The use of science to solve problems or to make devices (or processes) that serve particular needs.
gait The pattern of leg motions by which an animal walks from place to place.
locomotion The ability to move from place to place.
mechanical engineer A scientist trained to design and build machines.
physicist A scientist who studies the nature and properties of matter and energy.
prototype A first or early model of something that still needs to be perfected.
spandex A stretchy fabric made of polyurethane.
thrust A force that makes an object move forward.
undulate To rise and fall in a predictable, wavelike way. This pattern can refer to motion, sound or shapes. Ocean waves are one example of undulations. So is the wavelike motion of a snake.
X-ray A form of electromagnetic radiation, similar to light, with a shorter wavelength that allows it to penetrate solids.
Word Find (click here to print puzzle)

This is one in a series on careers in science, technology, engineering and mathematics made possible by support from the Northrop Grumman Foundation.







