These young inventors had to make like a crab
Broadcom MASTERS finalists design and build a robotic arm by mimicking a crustacean

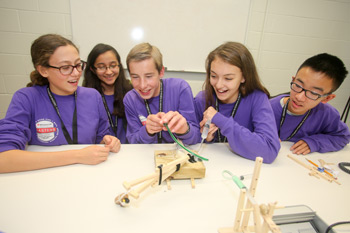
Karen McDonald of the Smithsonian Environmental Research Center shows a crab shell to students participating in the Broadcom MASTERS competition.
E. Brady Robinson/SSP
WASHINGTON, D.C. — When engineers tackle a design, they often copy one that has already evolved in some creature or plant. That’s called biomimicry. Finalists at this year’s Broadcom MASTERS research competition got a taste of how engineers do this. They had to design and build a working model of a robotic arm. These young designers had to base theirs on a crab claw — and finish it in less than two hours.
Broadcom MASTERS brings together 30 middle-school students each year for a special competition. (MASTERS stands for Math, Applied Science, Technology and Engineering for Rising Stars.) The program was created by Society for Science & the Public, which publishes Science News for Students. Broadcom Foundation sponsored the event. Unlike most science competitions, some 75 percent of a finalist’s score will come from how well they innovate and work with teammates on challenges. Only about one-fourth of their overall score will be based on the science-fair project they presented to judges earlier in the week.

This year, the students faced stiff challenges. They built complicated electronic circuits. They designed games that taught users about nutrition. But their final and most grueling challenge was the robotic arm.
“I liked this challenge the best,” says Nikolai Ortiz. This 13-year-old hails from Corpus Christi, Texas. Of all the week’s challenges, he notes, this engineering task was most like a project someone would encounter in the real world. Also, he brags, “our team had some really creative ideas.”
Their inspiration
The challenge took place at the Smithsonian Environmental Research Center, or SERC, in Edgewater, Md. This center sits along the shore of the Rhode River, a short waterway that flows into the Chesapeake Bay. This huge bay hosts plenty of Atlantic blue crab. And that’s the species that inspired this challenge.
The first step in biomimicry is learning about the species being mimicked. The students learned that their crab’s scientific name is Callinectes sapidus. Roughly translated from Latin, it means “beautiful tasty swimmer,” says Karen McDonald. She’s an environmental scientist at SERC. And although this crab is often called the Chesapeake blue crab, it also swims in the waters of the western Atlantic and Gulf of Mexico. Tens of millions are caught and eaten each year.
These crabs can grow up to 23 centimeters (9 inches) across. But they start out hatching from eggs about the size of a grain of sand. Like many shelled creatures, they molt, or shed their shell, as they grow.

In all, this species will molt 27 times, notes McDonald. Each time it molts, the crab becomes vulnerable to predators. That’s because to squeeze out of the old shell, its new shell must be very soft and flexible. The new shell doesn’t completely harden until 2 to 3 days after it has been exposed to water.
During that short interval, the crab can’t move like it normally does. When the crab’s shell is hard, muscles can pull against it. (This is similar to how people move, except our hard parts are the bones inside, not shells on the outside.) But when the crab’s shell is soft, muscles have nothing firm to pull against. So instead, the crabs use their muscles to pump fluid around inside their bodies. This pressurized fluid, like air moving in and out of a balloon, causes movement, explains McDonald. And this is where the Broadcom MASTERS challenge took its inspiration.
The engineered design
The students worked in teams of five. Each was named for a color. Their crab-inspired robotic arms would have to be powered by that movement of fluid, not by a muscle-like pull on a string. (The science of using the movement of liquids to exert force or control is known as hydraulics.) The engineered arm would be something that might be attached to an underwater vehicle and used to explore the ocean. It had to rotate through an angle of at least 90 degrees at its “elbow.”
To provide hydraulic force for these robotic arms, the teams could use syringes, rubber tubing and water. They also had a variety of wooden components to choose from when building their devices. These included small slabs, wooden disks and craft sticks. The teams could use glue, paper clips, tape or rubber bands to hold their devices together.
After taking a half-hour to design their projects (and a quick lunch that didn’t include crab cakes), the students had 90 minutes to build their robot arm.
All six teams worked separately. Each took a slightly different approach. Some used hydraulics to both extend and retract their arm. Others used hydraulics to extend their arm but rubber bands to retract it. During the building process, there was much trial and error — and many false starts. Some designs had to be modified or even totally scrapped. In the end, some arms worked much better than others.
At the close of the challenge, each team discussed its design and demonstrated its action. “I’m amazed at how well you did with this design challenge,” McDonald told the finalists. “You worked really well as teams.”
As the finalists took their robotic arms apart and stored the pieces they’d used, McDonald told me she was very impressed with their end results. Indeed, she said, “I’m not sure our [SERC] engineers could have come up with something in just two hours.”






